
2021-10-04 RK methods for stiff problems¶
Last time¶
Accuracy and stability barriers
Runge-Kutta methods
Today¶
Design of Runge-Kutta methods
Adaptive error control
Diagonally implicit RK
Fully implicit RK
Explore benchmarks
using Plots
using LinearAlgebra
using SparseArrays
using Zygote
default(linewidth=5)
function newton(residual, jacobian, u0; maxits=20)
u = u0
uhist = [copy(u)]
normhist = []
for k in 1:maxits
f = residual(u)
push!(normhist, norm(f))
J = jacobian(u)
delta_u = - J \ f
u += delta_u
push!(uhist, copy(u))
end
uhist, normhist
end
function plot_stability(Rz, title; xlims=(-2, 2), ylims=(-2, 2))
x = LinRange(xlims[1], xlims[2], 100)
y = LinRange(ylims[1], ylims[2], 100)
heatmap(x, y, (x, y) -> abs(Rz(x + 1im*y)), c=:bwr, clims=(0, 2), aspect_ratio=:equal, title=title)
end
Rz_theta(z, theta) = (1 + (1 - theta)*z) / (1 - theta*z)
plot_stability(z -> Rz_theta(z, .5), "Midpoint method")
function ode_theta_linear(A, u0; forcing=zero, tfinal=1, h=0.1, theta=.5)
u = copy(u0)
t = 0.
thist = [t]
uhist = [u0]
while t < tfinal
tnext = min(t+h, tfinal)
h = tnext - t
rhs = (I + h*(1-theta)*A) * u .+ h*forcing(t+h*theta)
u = (I - h*theta*A) \ rhs
t = tnext
push!(thist, t)
push!(uhist, u)
end
thist, hcat(uhist...)
end
function advdiff_matrix(n; kappa=1, wind=1, upwind=0.)
dx = 2 / n
rows = [1]
cols = [1]
vals = [0.]
wrap(j) = (j + n - 1) % n + 1
for i in 1:n
append!(rows, [i, i, i])
append!(cols, wrap.(i-1:i+1))
diffuse = [-1, 2, -1] * kappa / dx^2
advect_upwind = [-1, 1, 0] * wind / dx
advect_center = [-1, 0, 1] * wind / 2dx
stencil = -diffuse - upwind * advect_upwind - (1 - upwind) * advect_center
append!(vals, stencil)
end
sparse(rows, cols, vals)
end
advdiff_matrix (generic function with 1 method)
struct RKTable
A::Matrix
b::Matrix
c::Vector
function RKTable(A, b)
s = size(b, 2)
A = reshape(A, s, s)
c = vec(sum(A, dims=2))
new(A, b, c)
end
end
function rk_stability(z, rk; brow=1)
s = size(rk.b, 2)
1 + z * rk.b[1,:]' * ((I - z*rk.A) \ ones(s))
end
heun = RKTable([0 0; 1 0], [.5 .5])
rk4 = RKTable([0 0 0 0; .5 0 0 0; 0 .5 0 0; 0 0 1 0], [1 2 2 1] / 6)
function ode_rk_explicit(f, u0; tfinal=1, h=0.1, table=rk4)
u = copy(u0)
t = 0.
n, s = length(u), length(table.c)
fY = zeros(n, s)
thist = [t]
uhist = [u0]
while t < tfinal
tnext = min(t+h, tfinal)
h = tnext - t
for i in 1:s
ti = t + h * table.c[i]
Yi = u + h * sum(fY[:,1:i-1] * table.A[i,1:i-1], dims=2)
fY[:,i] = f(ti, Yi)
end
u += h * fY * table.b[1,:]
t = tnext
push!(thist, t)
push!(uhist, u)
end
thist, hcat(uhist...)
end
ode_rk_explicit (generic function with 1 method)
Runge-Kutta methods¶
The methods we have considered thus far can all be expressed as Runge-Kutta methods, which are expressed in terms of \(s\) “stage” equations (possibly coupled) and a completion formula. For the ODE
the Runge-Kutta method is
where \(c\) is a vector of abscissa, \(A\) is a table of coefficients, and \(b\) is a vector of completion weights.
These coefficients are typically expressed in a Butcher Table
If the matrix \(A\) is strictly lower triangular, then the method is explicit (does not require solving equations).
Measuring convergence and accuracy¶
function mms_error(h, f, u_exact; table=rk4)
u0 = u_exact(0)
thist, uhist = ode_rk_explicit(f, u0, tfinal=3, h=h, table=table)
T = thist[end]
uhist[:,end] - u_exact(T)
end
hs = .5 .^ (-3:8)
linear_oscillator_exact(t) = [cos(t), sin(t)]
linear_oscillator_exact (generic function with 1 method)
linear_oscillator(t, u) = [0 -1; 1 0] * u
heun_errors = mms_error.(hs, linear_oscillator, linear_oscillator_exact, table=heun)
rk4_errors = mms_error.(hs, linear_oscillator, linear_oscillator_exact, table=rk4)
plot(hs, [norm.(heun_errors) norm.(rk4_errors)], label=["heun" "rk4"], marker=:auto)
plot!(hs, [hs hs.^2 hs.^3 hs.^4], label=["\$h^$p\$" for p in [1 2 3 4]])
plot!(legend=:topleft, xscale=:log10, yscale=:log10, xlabel="\$\\Delta t\$", ylabel="error")

Work-precision (or accuracy vs cost)¶
heun_nfeval = length(heun.c) ./ hs
rk4_nfeval = length(rk4.c) ./ hs
plot(heun_nfeval, norm.(heun_errors), marker=:auto, label="heun")
plot!(rk4_nfeval, norm.(rk4_errors), marker=:auto, label="rk4")
plot!(xscale=:log10, yscale=:log10, xlabel="# function evals", ylabel="error")

Effective RK stability diagrams¶
function rk_eff_stability(z, rk; brow=1)
s = size(rk.b, 2)
fsal = rk.b[1,:] ≈ rk.A[end,:]
z = (s - fsal) * z
1 + z * rk.b[brow,:]' * ((I - z*rk.A) \ ones(s))
end
plot_stability(z -> rk_eff_stability(z, heun), "Heun's method")

plot_stability(z -> rk_eff_stability(z, rk4), "RK4")

Runge-Kutta order conditions¶
We consider the autonomous differential equation
Higher derivatives of the exact soultion can be computed using the chain rule, e.g.,
Note that if \(f(u)\) is linear, \(f''(u) = 0\). Meanwhile, the numerical solution is a function of the time step \(h\),
We will take the limit \(h\to 0\) and equate derivatives of the numerical solution. First we differentiate the stage equations,
\begin{split} Y_i(0) &= u(0) \ \dot Y_i(0) &= \sum_j a_{ij} f(Y_j) \ \ddot Y_i(0) &= 2 \sum_j a_{ij} \dot f(Y_j) \ &= 2 \sum_j a_{ij} f’(Y_j) \dot Y_j \ &= 2\sum_{j,k} a_{ij} a_{jk} f’(Y_j) f(Y_k) \ \dddot Y_i(0) &= 3 \sum_j a_{ij} \ddot f (Y_j) \ &= 3 \sum_j a_{ij} \Big( \sum_k f’’(Y_j) \dot Y_j \dot Y_k + f’(Y_j) \ddot Y_j \Big) \ &= 3 \sum_{j,k,\ell} a_{ij} a_{jk} \Big( a_{j\ell} f’’(Y_j) f(Y_k) f(Y_\ell) + 2 a_{k\ell} f’(Y_j) f’(Y_k) f(Y_\ell) \Big) \end{split}
where we have used Liebnitz’s formula for the \(m\)th derivative,
Order conditions are nonlinear algebraic equations¶
Equating terms \(\dot u(0) = \dot U(0)\) yields
Observations¶
These are systems of nonlinear equations for the coefficients \(a_{ij}\) and \(b_j\). There is no guarantee that they have solutions.
The number of equations grows rapidly as the order increases.
\(u^{(1)}\) |
\(u^{(2)}\) |
\(u^{(3)}\) |
\(u^{(4)}\) |
\(u^{(5)}\) |
\(u^{(6)}\) |
\(u^{(7)}\) |
\(u^{(8)}\) |
\(u^{(9)}\) |
\(u^{(10)}\) |
|
|---|---|---|---|---|---|---|---|---|---|---|
# terms |
1 |
1 |
2 |
4 |
9 |
20 |
48 |
115 |
286 |
719 |
cumulative |
1 |
2 |
4 |
8 |
17 |
37 |
85 |
200 |
486 |
1205 |
Usually the number of order conditions does not exactly match the number of free parameters, meaning that the remaining parameters can be optimized (usually numerically) for different purposes, such as to minimize the leading error terms or to maximize stability in certain regions of the complex plane. Finding globally optimal solutions can be extremely demanding.
Rooted trees provide a convenient notation
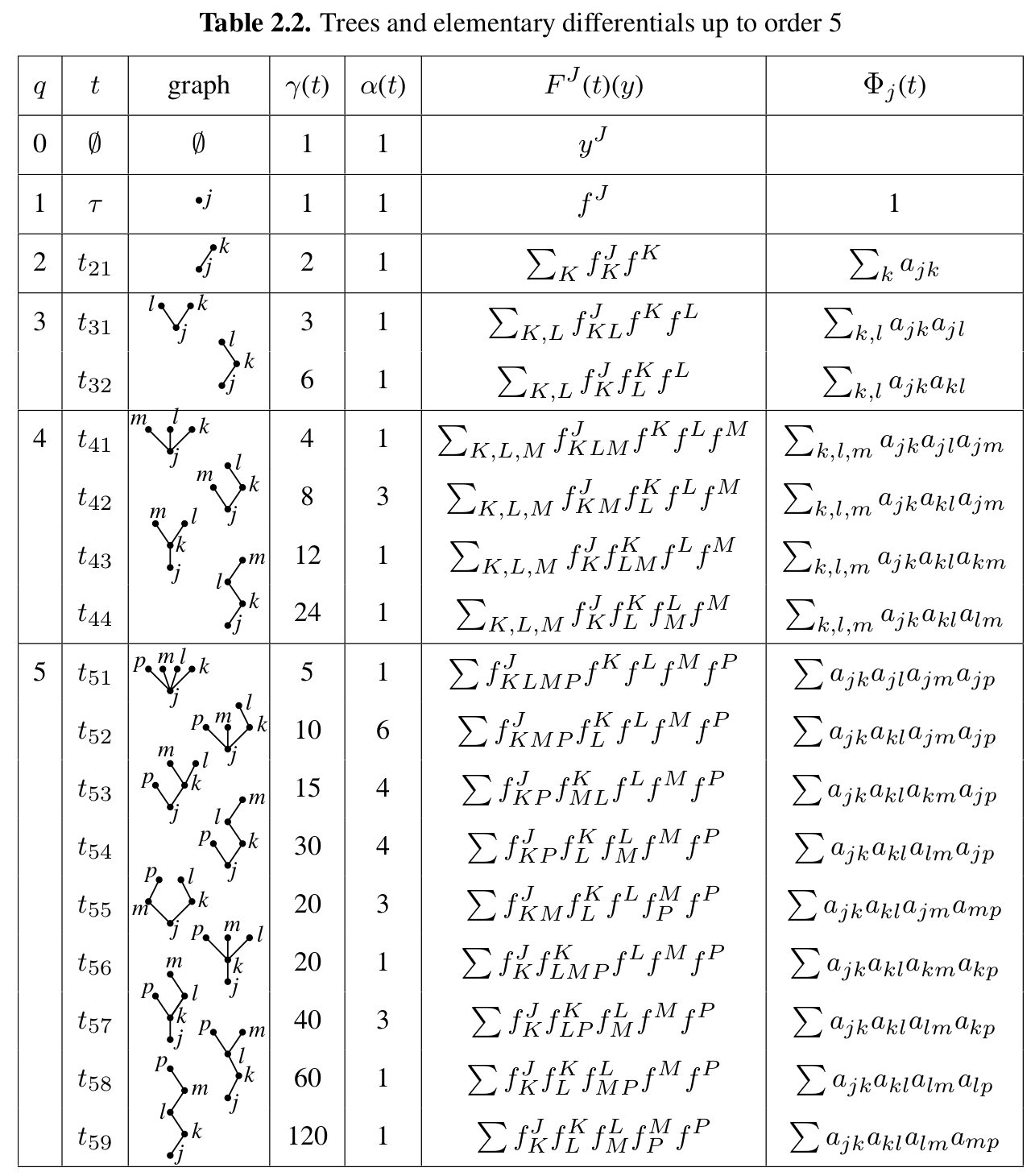
Theorem (from Hairer, Nørsett, and Wanner)¶
A Runge-Kutta method is of order \(p\) if and only if
For a linear autonomous equation
Embedded error estimation¶
It is often possible to design Runge-Kutta methods with multiple completion orders, say of order \(p\) and \(p-1\).
The classical RK4 does not come with an embedded method, but most subsequent RK methods do. The Bogacki-Shampine method is one such method.
bs3 = RKTable([0 0 0 0; 1/2 0 0 0; 0 3/4 0 0; 2/9 1/3 4/9 0],
[2/9 1/3 4/9 0; 7/24 1/4 1/3 1/8])
plot_stability(z -> rk_eff_stability(z, bs3), "BS3 third order")

plot_stability(z -> rk_eff_stability(z, bs3, brow=2), "BS3 second order")

Properties¶
display(bs3.A)
display(bs3.b)
4×4 Matrix{Float64}:
0.0 0.0 0.0 0.0
0.5 0.0 0.0 0.0
0.0 0.75 0.0 0.0
0.222222 0.333333 0.444444 0.0
2×4 Matrix{Float64}:
0.222222 0.333333 0.444444 0.0
0.291667 0.25 0.333333 0.125
First same as last (FSAL): the completion formula \(b\) is the same as the last row of \(A\).
Stage can be reused as first stage of the next time step. So this 4-stage method has a cost equal to a 3-stage method.
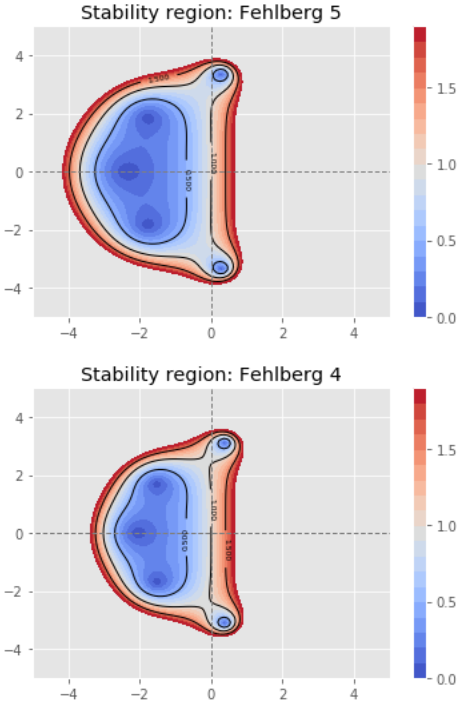
Fehlberg, a 6-stage, 5th order method for which the 4th order embedded formula has been optimized for accuracy.
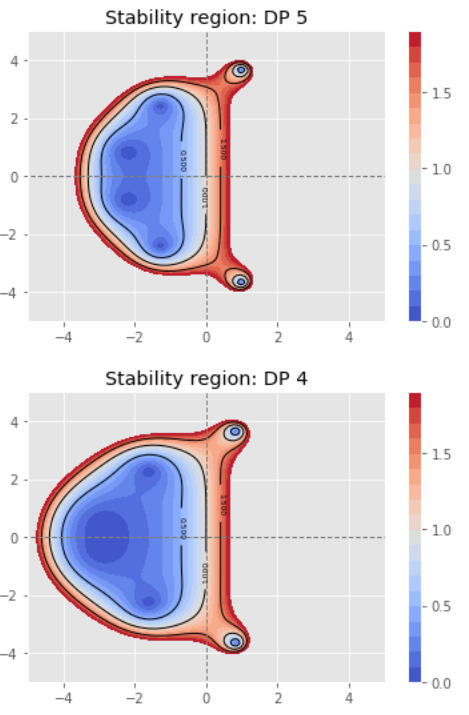
Dormand-Prince, a 7-stage, 5th order method with the FSAL property, with the 5th order completion formula optimized for accuracy.
Adaptive step size control¶
Given a completion formula \(b^T\) of order \(p\) and \(\tilde b^T\) of order \(p-1\), an estimate of the local truncation error (on this step) is given by
Notes¶
Usually a “safety factor” less than 1 is included so the predicted error is less than the threshold to reject a time step.
We have used an absolute tolerance above. If the values of solution variables vary greatly in time, a relative tolerance \(e_{\text{loc}}(h) / \lVert u(t) \rVert\) or a combination thereof is desirable.
There is a debate about whether one should optimize the rate at which error is accumulated with respect to work (estimate above) or with respect to simulated time (as above, but with error behaving as \(O(h^{p-1})\)). For problems with a range of time scales at different periods, this is usually done with respect to work.
Global error control is an active research area.
Diagonally Implicit Runge-Kutta methods¶
# From Hairer and Wanner Table 6.5 L-stable SDIRK
dirk4 = RKTable([1/4 0 0 0 0; 1/2 1/4 0 0 0; 17/50 -1/25 1/4 0 0; 371/1360 -137/2720 15/544 1/4 0; 25/24 -49/48 125/16 -85/12 1/4],
[24/24 -49/48 125/16 -85/12 1/4; 59/48 -17/96 225/32 -85/12 0]);
#dirk4.A
plot_stability(z -> rk_eff_stability(z, dirk4, brow=1), "DIRK fourth order")

plot_stability(z -> rk_eff_stability(z, dirk4, brow=2), "DIRK third order")

Fully implicit Runge-Kutta methods¶
radau3 = RKTable([5/12 -1/12; 3/4 1/4], [3/4 1/4])
plot_stability(z -> rk_eff_stability(z, radau3), "Radau 3")

gauss4 = RKTable([1/4 1/4-sqrt(3)/6; 1/4+sqrt(3)/6 1/4],
[1/2 1/2])
plot_stability(z -> rk_eff_stability(z, gauss4), "Gauss 4")

Explore benchmarks: https://benchmarks.sciml.ai/¶
Today¶
Work in groups of 2 or 3
Find one interesting figure
Report-out/discuss¶
Explain something about the figure
Ask a question
For next time (still in groups)¶
Pick any two methods
Make a hypothesis about how they’ll work on advection-diffusion
Test your hypothesis and share a figure on Zulip