
2023-10-04 Runge-Kutta#
Last time#
Advection-diffusion
\(A\)- and \(L\)-stability
Spatial, temporal, and physical dissipation
Stiffness
Today#
Exploring stiffness
Runge-Kutta methods
using Plots
default(linewidth=3)
using LinearAlgebra
using SparseArrays
function plot_stability(Rz, title; xlims=(-3, 3), ylims=(-2, 2))
x = LinRange(xlims[1], xlims[2], 100)
y = LinRange(ylims[1], ylims[2], 100)
heatmap(x, y, (x, y) -> abs(Rz(x + 1im*y)), c=:bwr, clims=(0, 2), aspect_ratio=:equal, title=title)
end
function ode_theta_linear(A, u0; forcing=zero, tfinal=1, h=0.1, theta=.5)
u = copy(u0)
t = 0.
thist = [t]
uhist = [u0]
while t < tfinal
tnext = min(t+h, tfinal)
h = tnext - t
rhs = (I + h*(1-theta)*A) * u .+ h*forcing(t+h*theta)
u = (I - h*theta*A) \ rhs
t = tnext
push!(thist, t)
push!(uhist, u)
end
thist, hcat(uhist...)
end
Rz_theta(z, theta) = (1 + (1 - theta)*z) / (1 - theta*z)
function advdiff_matrix(n; kappa=1, wind=1, upwind=0.)
dx = 2 / n
rows = [1]
cols = [1]
vals = [0.]
wrap(j) = (j + n - 1) % n + 1
for i in 1:n
append!(rows, [i, i, i])
append!(cols, wrap.(i-1:i+1))
diffuse = [-1, 2, -1] * kappa / dx^2
advect_upwind = [-1, 1, 0] * wind / dx
advect_center = [-1, 0, 1] * wind / 2dx
stencil = -diffuse - upwind * advect_upwind - (1 - upwind) * advect_center
append!(vals, stencil)
end
sparse(rows, cols, vals)
end
advdiff_matrix(5, kappa=.1)
5×5 SparseMatrixCSC{Float64, Int64} with 15 stored entries:
-1.25 -0.625 ⋅ ⋅ 1.875
1.875 -1.25 -0.625 ⋅ ⋅
⋅ 1.875 -1.25 -0.625 ⋅
⋅ ⋅ 1.875 -1.25 -0.625
-0.625 ⋅ ⋅ 1.875 -1.25
Stiffness#
Stiff equations are problems for which explicit methods don’t work. (Hairer and Wanner, 2002)
“stiff” dates to Curtiss and Hirschfelder (1952)
k = 30
thist, uhist = ode_theta_linear(-k, [1.0], forcing=t -> k*cos(t), tfinal=5, h=.1, theta=0.5)
scatter(thist, uhist[1,:])
plot!(cos)
function mms_error(h; theta=.5, k=10)
u0 = [.2]
thist, uhist = ode_theta_linear(-k, u0, forcing=t -> k*cos(t), tfinal=3, h=h, theta=theta)
T = thist[end]
u_exact = (u0 .- k^2/(k^2+1)) * exp(-k*T) .+ k*(sin(T) + k*cos(T))/(k^2 + 1)
uhist[1,end] .- u_exact
end
mms_error (generic function with 1 method)
hs = .5 .^ (1:8)
errors = mms_error.(hs, theta=1, k=10000)
plot(hs, norm.(errors), marker=:circle, xscale=:log10, yscale=:log10)
plot!(hs, hs, label="\$h\$", legend=:topleft)
plot!(hs, hs.^2, label="\$h^2\$")
Discuss: is advection-diffusion stiff?#
theta=0
n = 80
dx = 2 / n
kappa = .005
lambda_min = -4 * kappa / dx^2
cfl = 1
h = min(-2 / lambda_min, cfl * dx)
plot_stability(z -> Rz_theta(z, theta),
"\$\\theta=$theta, h=$h, Pe_h = $(h/kappa)\$")
ev = eigvals(Matrix(h*advdiff_matrix(n, kappa=kappa, wind=1)))
scatter!(real(ev), imag(ev))
Cost scaling#
Spatial discretization with error \(O((\Delta x)^p)\)
Time discretization with error \(O((\Delta t)^q)\)
p = 2 # spatial order of accuracy
q = 2 # temporal order of accuracy
Pe = 100 # Peclet number with wind=1
dt_accuracy(dx) = dx .^ (p/q)
dt_stability(dx) = min(dx, Pe * dx ^ 2)
n = 2 .^ (1:10); dx = 1 ./ n
plot(dx, [dt_accuracy.(dx) dt_stability.(dx)],
label=["accuracy" "stability"],
xscale=:log10, yscale=:log10, legend=:bottomright,
xlabel="\$\\Delta x\$", ylabel="\$\\Delta t\$")
function error((dx, dt))
dt <= dt_stability(dx) ? dx ^ p + dt ^ q : 10
end
plot(n, [error.(zip(dx, dt_accuracy.(dx))) error.(zip(dx, dt_stability.(dx))) dx.^p],
label=["accuracy" "stability" "spatial only"],
marker=:circle, xscale=:log10, yscale=:log10,
xlabel="number of grid points", ylabel="error")
Work-precision (error vs cost)#
p = 2
q = 2
Pe = 10
dt = [dt_accuracy.(dx) dt_stability.(dx) dt_accuracy.(dx)]
c = [n./dt[:,1] n./dt[:,2] (n.^1.5)./dt[:,3]] # O(n^1.5 solve cost)
e = [error.(zip(dx, dt[:,1])) error.(zip(dx, dt[:,2])) dx.^p+dt[:,3].^q]
plot(c, e, xscale=:log10, yscale=:log10,
label=["explicit_accuracy" "explicit_stable" "implicit"], xlabel="cost", ylabel="error")
Stability can be an extreme demand for explicit methods
Order of accuracy matters; usually balance spatial order \(p\) and temporal order \(q\)
Actual cost depends heavily on solver efficiency: O(n) vs O(n^2)
“Constants matter”
Runge-Kutta methods#
The methods we have considered thus far can all be expressed as Runge-Kutta methods, which are expressed in terms of \(s\) “stage” equations (possibly coupled) and a completion formula. For the ODE
the Runge-Kutta method is
where \(c\) is a vector of abscissa, \(A\) is a table of coefficients, and \(b\) is a vector of completion weights.
These coefficients are typically expressed in a Butcher Table
If the matrix \(A\) is strictly lower triangular, then the method is explicit (does not require solving equations).
Past methods as Runge-Kutta#
Forward Euler
\[\begin{split} \left[ \begin{array}{c|cc} 0 & 0 \\ \hline & 1 \end{array} \right] ,\end{split}\]Backward Euler
\[\begin{split} \left[ \begin{array}{c|c} 1 & 1 \\ \hline & 1 \end{array} \right] ,\end{split}\]Midpoint
\[\begin{split} \left[ \begin{array}{c|c} \frac 1 2 & \frac 1 2 \\ \hline & 1 \end{array} \right]. \end{split}\]
Indeed, the \(\theta\) method is
Stability function for Runge-Kutta#
To develop an algebraic expression for stability in terms of the Butcher Table, we consider the test equation
and apply the RK method to yield
or, in matrix form,
where \(\mathbb 1\) is a column vector of length \(s\) consisting of all ones. This reduces to
Plotting stability#
struct RKTable
A::Matrix
b::Matrix
c::Vector
function RKTable(A, b)
s = size(b, 2)
A = reshape(A, s, s)
c = vec(sum(A, dims=2))
new(A, b, c)
end
end
function rk_stability(z, rk; brow=1)
s = size(rk.b, 2)
1 + z * rk.b[1,:]' * ((I - z*rk.A) \ ones(s))
end
rk_stability (generic function with 1 method)
theta = .0
rk_theta(theta) = RKTable([theta], [1]')
rk_theta_endpoint(theta) = RKTable([0 0;1-theta theta], [1-theta theta])
table = rk_theta(theta)
plot_stability(z -> rk_stability(z, table), "\$\\theta = $theta\$")
Heun’s method and RK4#
heun = RKTable([0 0; 1 0], [.5 .5])
plot_stability(z -> rk_stability(z, heun), "Heun's method")
rk4 = RKTable([0 0 0 0; .5 0 0 0; 0 .5 0 0; 0 0 1 0],
[1 2 2 1] / 6)
plot_stability(z -> rk_stability(z, rk4), "RK4")
An explicit RK solver#
function ode_rk_explicit(f, u0; tfinal=1, h=0.1, table=rk4)
u = copy(u0)
t = 0.
n, s = length(u), length(table.c)
fY = zeros(n, s)
thist = [t]
uhist = [u0]
while t < tfinal
tnext = min(t+h, tfinal)
h = tnext - t
for i in 1:s
ti = t + h * table.c[i]
Yi = u + h * sum(fY[:,1:i-1] * table.A[i,1:i-1], dims=2)
fY[:,i] = f(ti, Yi)
end
u += h * fY * table.b[1,:]
t = tnext
push!(thist, t)
push!(uhist, u)
end
thist, hcat(uhist...)
end
ode_rk_explicit (generic function with 1 method)
linear_oscillator(t, u) = [0 -1; 1 0] * u
thist, uhist = ode_rk_explicit(linear_oscillator, [1., 0], tfinal=6, h=1.2)
plot(thist, uhist', marker=:auto)
plot!([sin, cos])
Measuring convergence and accuracy#
function mms_error(h, f, u_exact; table=rk4)
u0 = u_exact(0)
thist, uhist = ode_rk_explicit(f, u0, tfinal=3, h=h, table=table)
T = thist[end]
uhist[:,end] - u_exact(T)
end
hs = .5 .^ (-3:8)
linear_oscillator_exact(t) = [cos(t), sin(t)]
linear_oscillator_exact (generic function with 1 method)
heun_errors = mms_error.(hs, linear_oscillator, linear_oscillator_exact, table=heun)
rk4_errors = mms_error.(hs, linear_oscillator, linear_oscillator_exact, table=rk4)
plot(hs, [norm.(heun_errors) norm.(rk4_errors)], label=["heun" "rk4"], marker=:auto)
plot!(hs, [hs hs.^2 hs.^3 hs.^4], label=["\$h^$p\$" for p in [1 2 3 4]], legend=:topleft, xscale=:log10, yscale=:log10)
Work-precision (or accuracy vs cost)#
heun_nfeval = length(heun.c) ./ hs
rk4_nfeval = length(rk4.c) ./ hs
plot(heun_nfeval, norm.(heun_errors), marker=:auto, label="heun")
plot!(rk4_nfeval, norm.(rk4_errors), marker=:auto, label="rk4")
plot!(xscale=:log10, yscale=:log10, xlabel="number of evaluations", ylabel="error")
Effective RK stability diagrams#
function rk_eff_stability(z, rk; brow=1)
s = size(rk.b, 2)
fsal = rk.b[1,:] ≈ rk.A[end,:]
z = (s - fsal) * z
1 + z * rk.b[brow,:]' * ((I - z*rk.A) \ ones(s))
end
plot_stability(z -> rk_eff_stability(z, heun), "Heun's method")
plot_stability(z -> rk_eff_stability(z, rk4), "RK4", xlims=(-2, 2), ylims=(-2, 2))
Runge-Kutta order conditions#
We consider the autonomous differential equation
Higher derivatives of the exact soultion can be computed using the chain rule, e.g.,
Note that if \(f(u)\) is linear, \(f''(u) = 0\). Meanwhile, the numerical solution is a function of the time step \(h\),
We will take the limit \(h\to 0\) and equate derivatives of the numerical solution. First we differentiate the stage equations,
\begin{split} Y_i(0) &= u(0) \ \dot Y_i(0) &= \sum_j a_{ij} f(Y_j) \ \ddot Y_i(0) &= 2 \sum_j a_{ij} \dot f(Y_j) \ &= 2 \sum_j a_{ij} f’(Y_j) \dot Y_j \ &= 2\sum_{j,k} a_{ij} a_{jk} f’(Y_j) f(Y_k) \ \dddot Y_i(0) &= 3 \sum_j a_{ij} \ddot f (Y_j) \ &= 3 \sum_j a_{ij} \Big( \sum_k f’’(Y_j) \dot Y_j \dot Y_k + f’(Y_j) \ddot Y_j \Big) \ &= 3 \sum_{j,k,\ell} a_{ij} a_{jk} \Big( a_{j\ell} f’’(Y_j) f(Y_k) f(Y_\ell) + 2 a_{k\ell} f’(Y_j) f’(Y_k) f(Y_\ell) \Big) \end{split}
where we have used Liebnitz’s formula for the \(m\)th derivative,
Order conditions are nonlinear algebraic equations#
Equating terms \(\dot u(0) = \dot U(0)\) yields
Observations#
These are systems of nonlinear equations for the coefficients \(a_{ij}\) and \(b_j\). There is no guarantee that they have solutions.
The number of equations grows rapidly as the order increases.
\(u^{(1)}\) |
\(u^{(2)}\) |
\(u^{(3)}\) |
\(u^{(4)}\) |
\(u^{(5)}\) |
\(u^{(6)}\) |
\(u^{(7)}\) |
\(u^{(8)}\) |
\(u^{(9)}\) |
\(u^{(10)}\) |
|
|---|---|---|---|---|---|---|---|---|---|---|
# terms |
1 |
1 |
2 |
4 |
9 |
20 |
48 |
115 |
286 |
719 |
cumulative |
1 |
2 |
4 |
8 |
17 |
37 |
85 |
200 |
486 |
1205 |
Usually the number of order conditions does not exactly match the number of free parameters, meaning that the remaining parameters can be optimized (usually numerically) for different purposes, such as to minimize the leading error terms or to maximize stability in certain regions of the complex plane. Finding globally optimal solutions can be extremely demanding.
Rooted trees provide a convenient notation
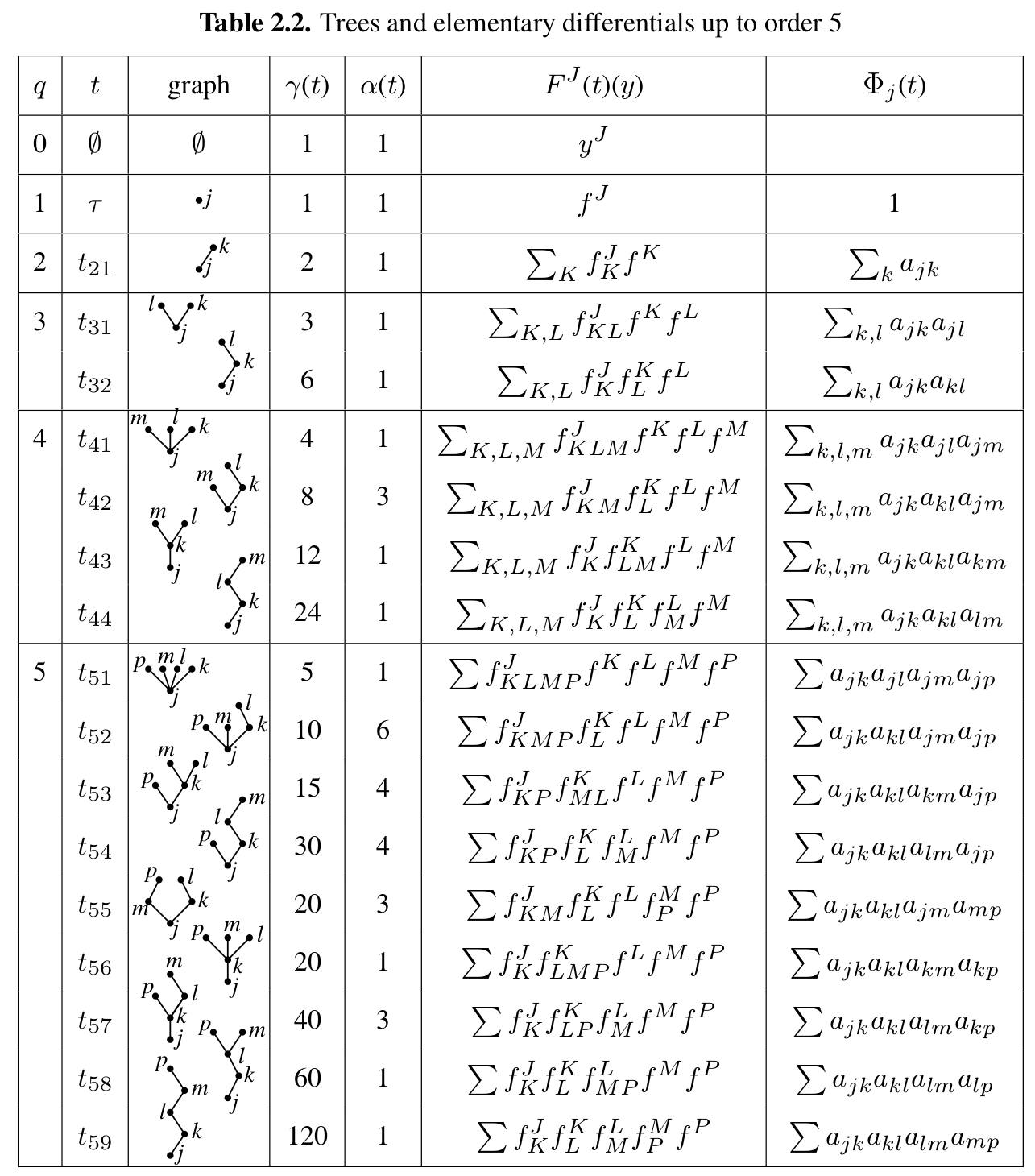
Theorem (from Hairer, Nørsett, and Wanner)#
A Runge-Kutta method is of order \(p\) if and only if
For a linear autonomous equation
Embedded error estimation#
It is often possible to design Runge-Kutta methods with multiple completion orders, say of order \(p\) and \(p-1\).
The classical RK4 does not come with an embedded method, but most subsequent RK methods do. The Bogacki-Shampine method is one such method.
bs3 = RKTable([0 0 0 0; 1/2 0 0 0; 0 3/4 0 0; 2/9 1/3 4/9 0],
[2/9 1/3 4/9 0; 7/24 1/4 1/3 1/8])
plot_stability(z -> rk_eff_stability(z, bs3), "BS3 third order")
plot_stability(z -> rk_eff_stability(z, bs3, brow=2), "BS3 second order")
Properties#
display(bs3.A)
display(bs3.b)
4×4 Matrix{Float64}:
0.0 0.0 0.0 0.0
0.5 0.0 0.0 0.0
0.0 0.75 0.0 0.0
0.222222 0.333333 0.444444 0.0
2×4 Matrix{Float64}:
0.222222 0.333333 0.444444 0.0
0.291667 0.25 0.333333 0.125
First same as last (FSAL): the completion formula \(b\) is the same as the last row of \(A\).
Stage can be reused as first stage of the next time step. So this 4-stage method has a cost equal to a 3-stage method.
Fehlberg, a 6-stage, 5th order method for which the 4th order embedded formula has been optimized for accuracy.
Dormand-Prince, a 7-stage, 5th order method with the FSAL property, with the 5th order completion formula optimized for accuracy.
Adaptive step size control#
Given a completion formula \(b^T\) of order \(p\) and \(\tilde b^T\) of order \(p-1\), an estimate of the local truncation error (on this step) is given by
Notes#
Usually a “safety factor” less than 1 is included so the predicted error is less than the threshold to reject a time step.
We have used an absolute tolerance above. If the values of solution variables vary greatly in time, a relative tolerance \(e_{\text{loc}}(h) / \lVert u(t) \rVert\) or a combination thereof is desirable.
There is a debate about whether one should optimize the rate at which error is accumulated with respect to work (estimate above) or with respect to simulated time (as above, but with error behaving as \(O(h^{p-1})\)). For problems with a range of time scales at different periods, this is usually done with respect to work.
Global error control is an active research area.
Diagonally Implicit Runge-Kutta methods#
# From Hairer and Wanner Table 6.5 L-stable SDIRK
dirk4 = RKTable([1/4 0 0 0 0; 1/2 1/4 0 0 0; 17/50 -1/25 1/4 0 0; 371/1360 -137/2720 15/544 1/4 0; 25/24 -49/48 125/16 -85/12 1/4],
[24/24 -49/48 125/16 -85/12 1/4; 59/48 -17/96 225/32 -85/12 0]);
#dirk4.A
plot_stability(z -> rk_eff_stability(z, dirk4, brow=1), "DIRK fourth order")
plot_stability(z -> rk_eff_stability(z, dirk4, brow=2), "DIRK third order")
Fully implicit Runge-Kutta methods#
radau3 = RKTable([5/12 -1/12; 3/4 1/4], [3/4 1/4])
plot_stability(z -> rk_eff_stability(z, radau3), "Radau 3")
gauss4 = RKTable([1/4 1/4-sqrt(3)/6; 1/4+sqrt(3)/6 1/4],
[1/2 1/2])
plot_stability(z -> rk_eff_stability(z, gauss4), "Gauss 4")
Explore benchmarks: https://benchmarks.sciml.ai/#
Find at least one interesting figure
You can work in groups
Report-out/discuss next class#
Explain something about the figure
Ask a question